Please review this outline and leave comments below.
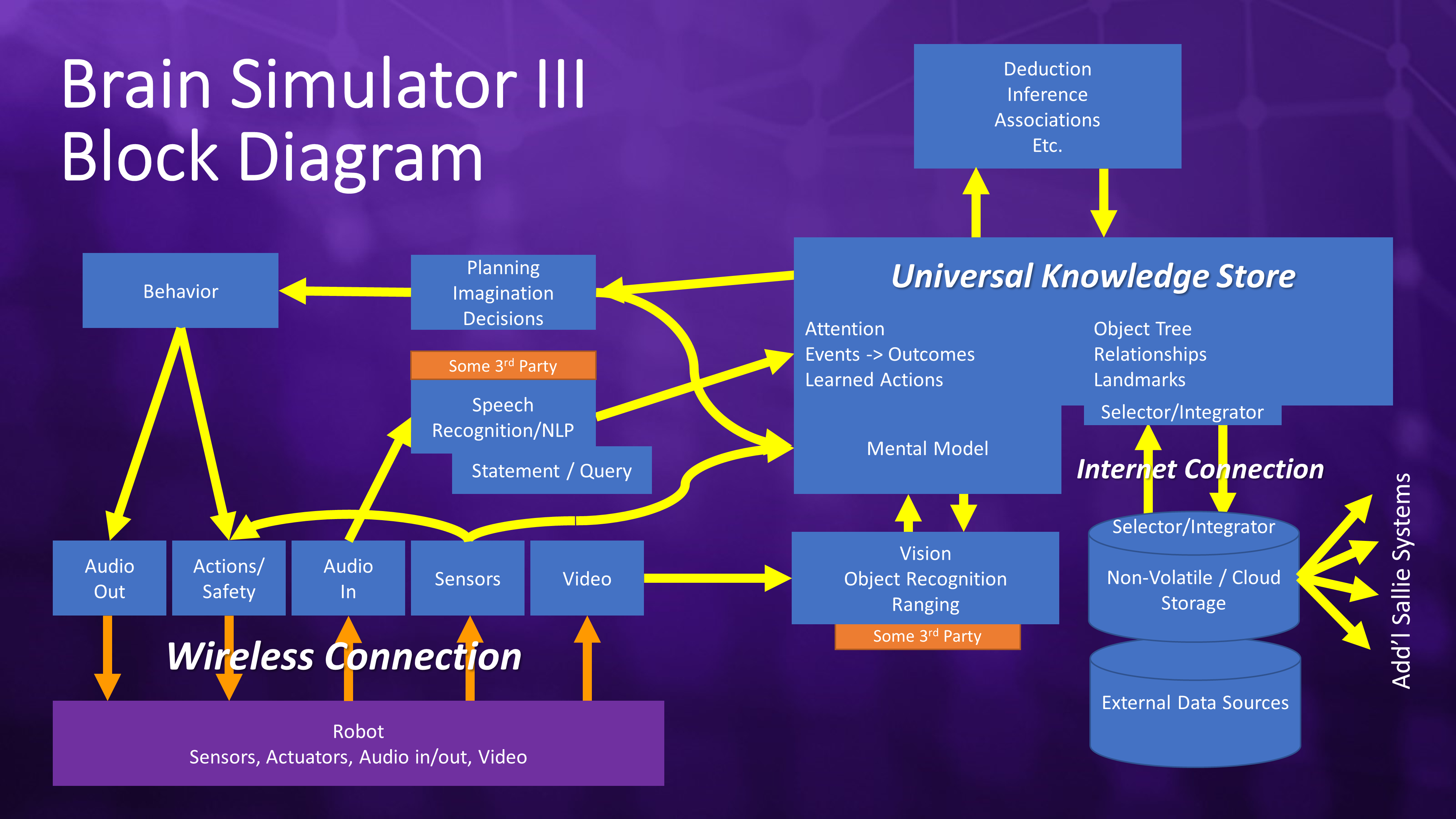
The Brain Simulator 3 consists of a Universal Knowledge Store (UKS) and a suite of largely independent Modules or Agents which can operate on the UKS and potentially interface with the outside world. Here is a top-level (and largely top-down) list of capabilities needed to add Common Sense to the system. Each of these will be fleshed out in upcoming separate posts.
- A “Decision” system for choosing what to say or do in any given situation. Choosing reasonable responses is the key to Common Sense. The system stores information on situations and how a situation and an action can lead to a new result. Keys to success: search for nearly-matching situations; learning new situations/actions/result groups. This structure can be searched for chains of events which may lead to a goal for planning (this ability exists just needs to be migrated). This relies on the ability to describe or discern goals. Initial Details are HERE.
- A “Verbal” system which isolates words and phrases (sequences) from the abstract Things they mean. Think: multilingual system where underlying abstract knowledge in the UKS can be understood or expressed any number of ways. Although multilingual is not a fundamental requirement it implies the decoupling of language from meaning. This system would allow for ambiguity, idioms and redundancy in the input and output language. Any abstract Thing could be referenced by any number of word and phrase Things and a confidence system would sort out the most likely meanings. Keys to success: saving phrases and associating them with Things based on repetition (basketball mentioned often while seeing one) or direction (“this is a basketball”); mechanism for inferring meaning from context; creating fill-in-the-blanks common phrases.
- A “Vision” system which would recognize images in the visual field storing images of Things as sequences of graphic primitives and perform recognition by visual input and learning new abstract physical objects. This would be able to start from primitives and build up a library of more complex visual patterns. Keys to success: a searchable structure for handling graphic images (biologically plausible?).
- A “robotic” system which is necessary to allow the vision, verbal, and decision systems to interact with an environment. Keys to success: good simulator for testing; safety; feedback.
- A “Mental Model” which would keep track of surrounding objects to allow for an understanding of three dimensionality and object persistence. When an object is sensed, it is stored in the mental model and the mental model is adjusted whenever the point of view changes. This largely exists.
- A “Retention Learning” system which stores all of its sensations in the UKS and immediately prunes away information which proves to be irrelevant or erroneous. This leaves a UKS with useful information. This system underlies the decision, verbal, vision, and robotic systems which are receive continuous real-world input and need to be able to search rapidly on a closest-match basis.